
辨識速度很快一直是我的車牌辨識技術的極大優勢!所以我的車載車牌辨識才能稱霸台灣市場七八年之久嘛!但是我並不滿足於此,我總覺得還可以更快!這就是我這幾個月來新一波的研究重點!我希望從影像二值化的程序切入,讓辨識速度倍增!如上的案例顯示我真的做到了!
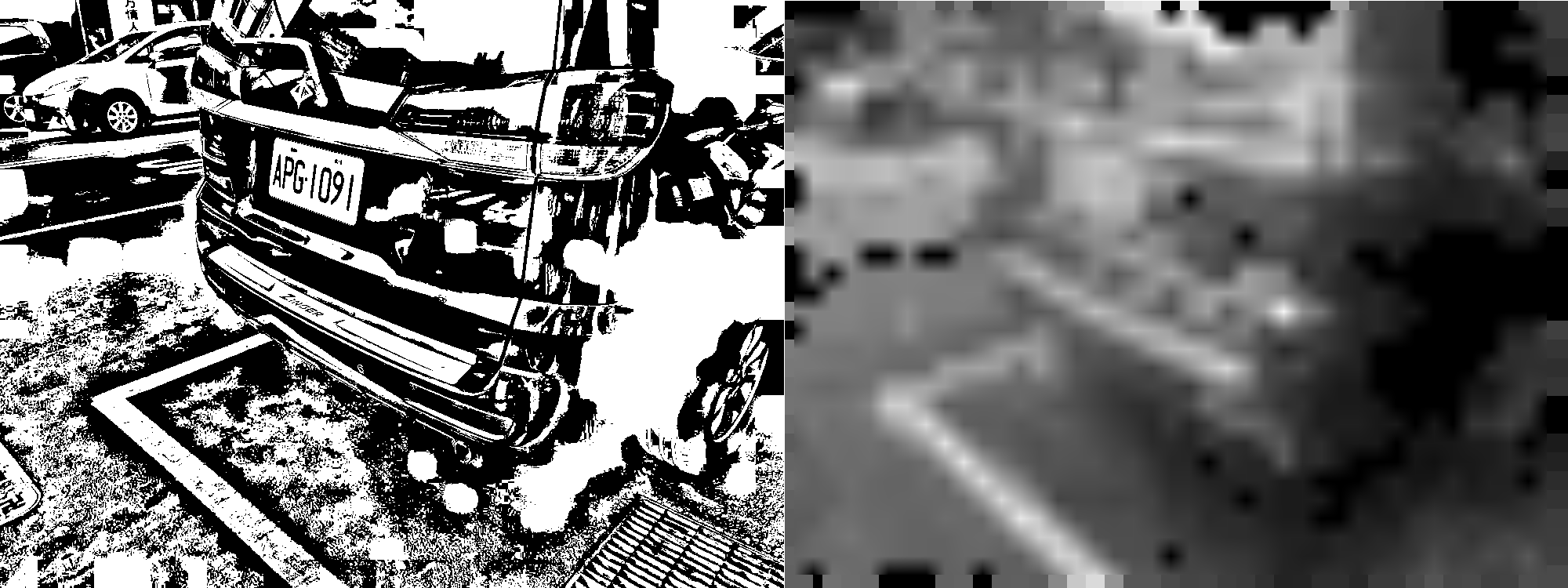
上圖左是我原來的標準辨識序做出來的「動態」二值化,就是二值化的門檻會根據「附近區域」的概略亮度動態調整,好處就是不管在暗處或亮處的車牌,或任何較高對比度的目標,都可以被呈現出來!但缺點就是必須計算每個小區域的平均亮度,我大約每20X20的方塊就會計算一個亮度,就是要計算出如上圖右的一個低通濾波的圖,原圖中的每個點是黑是白都必須參考這個圖。
這當然會消耗蠻大的計算量,也是我的資料前處理中最耗時的部分!而且這樣動態的二值化處理會呈現更多更複雜的可能候選車牌字元目標,表示我從這些目標中組織出最佳車牌的時間也會長一點!如果我的二值化可以簡化到全圖只用一個門檻值,不必計算每個小分區亮度,二值化時也只需要參考一個常數,那當然就會快很多了!
要讓二值化門檻簡化成全圖只是一個常數,又希望可以用這個門檻切割出根本還不知道在哪裡的車牌字元?最簡單的想法就是算出全圖的平均亮度做為門檻,甚至亂猜兩三個高低數值做全圖的二值化速度都常常可以快過我原有的動態二值化!但還是有很多案例會抓不到或抓不準,所以這些日子我還在持續尋找快又準的全圖門檻計算方式!
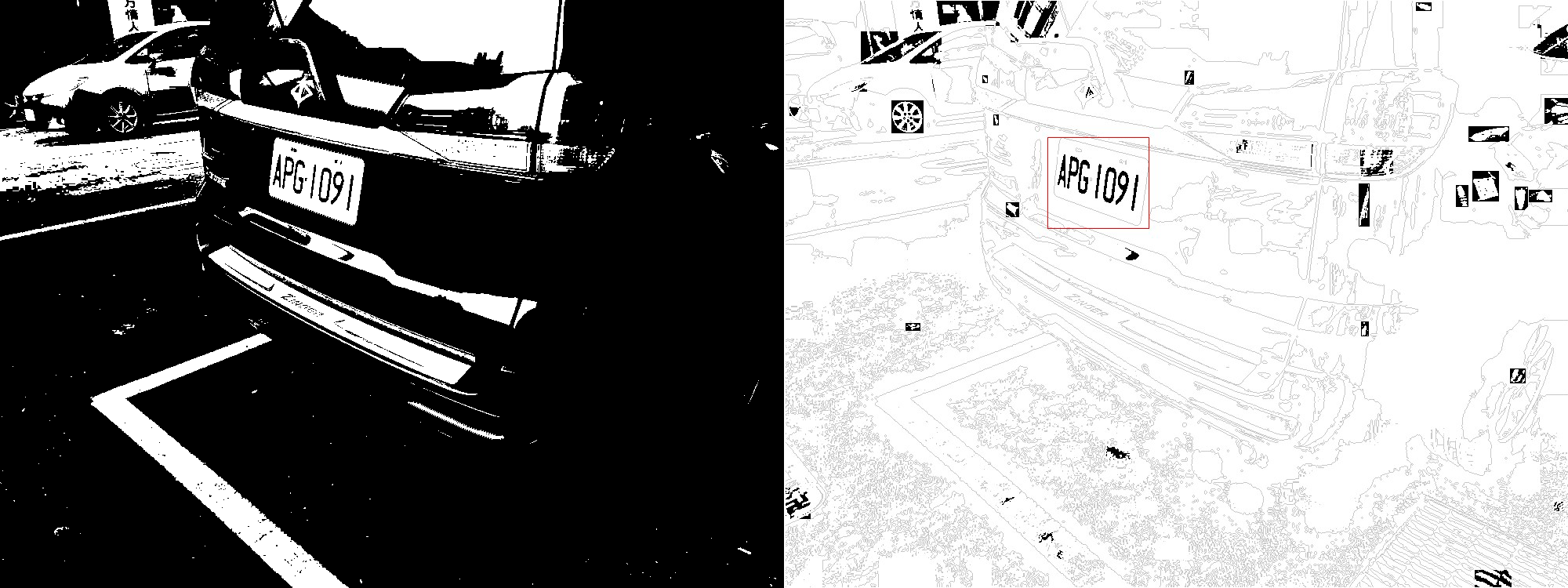
上面就是我最新的成果!如最上圖所示,整體辨識速度從115變成52毫秒!真的快了一倍!更重要的是:正確切割出車牌字元的機率大增!幾乎跟我用動態二值化門檻的成功率一樣高!怎麼決定的呢?我也可以大方與讀者分享!
我的基本假設是:在街景影像中車牌字元的對比度通常是最高的!如果我逐點掃描圖中的灰階,碰到跟鄰點亮度差異大的,就計算此點跟鄰點的平均值,這就是可能的門檻值了!我以全圖抽樣的方式找到數百個這種特徵點,將他們的平均值經過適當的加總統計之後,那個值可以正確切割出車牌的機率就非常高了!
所謂的:「又要馬兒跑,又要馬兒不吃草!」就是我現在嘗試在做的事了!有沒有意義呢?在商業優勢考慮上,可以更加大我的技術領先差距!譬如車載車牌辨識的產品,有了新程序我可以跑得更快更省電!也更能在高速行駛中辨識到更多車!在其他不需要高速的產品應用上,我也可以拿到節能環保的標章了!
有趣的是:現在輝達推動的那些AI都是很耗電,需要大量算力的!甚至暗示越是耗電就越AI?其實未必一定如此的!如果可以從演算法上面下功夫,是可以做到越AI同時還能越省電的!就是提高計算的效率,減少運算達到更高的AI目標!也就是我的公司目前天天在做的事!













限會員,要發表迴響,請先登入


