有位系統整合商如此問我!他們自己有軟體設計能力,想直接跟我買DLL來開發自有軟體,所以有此一問!既有「閘門」當然就是車輛停下等待辨識的停車場操作模式了!他的構想是設計一個觸發裝置,等車壓線停到定位之後連拍十張作統計的意思!
我立即告訴他:重點不是我的辨識速度有多快?而是車停在原處連續拍很多張,影像應該只有背景雜訊的些微差異,辨識的結果應該會完全一樣的!就是如果有一個原因讓辨識出錯,十張都會呈現一樣的錯誤,此時即使有100張的大數據也無法提升辨識正確率的!
粗糙的機器學習思維模式,讓人以為:只要資料量多,加以統計後判斷的效果就一定會比單一資料的判斷好?其實真的有操作過機器學習的人都會知道:資料的量不是唯一重點!資料內容涵蓋的有意義的變異量才是能否做出好結果的關鍵!就是說三張有代表性差異的資料,會比三十張高度重複的資料更有效果!
所以如果你希望提升如上情境的車牌辨識正確率,其實應該是在車輛未停止還在移動中時連續拍幾張,每張的位置角度都稍有不同,用這樣有些微差異的資料作統計,才會有他預期的統計效果!如果有個隨機特殊的原因讓某一張產生錯誤,就會被其他正確且大量重複的正確辨識結果給壓抑排除了!
這其實就是我的動態車牌辨識軟體在做的事情!我的停車場動態辨識就是內建每秒十次的連續辨識,然後以某種統計方式找出該車次最可能正確的答案!如果原始資料單張的辨識正確率是90%,加上資料統計,每單一「車次」的正確率就會大於99%了!因為錯誤通常是隨機偶爾出現的,正確的則會大量重複的出現!要讓一輛車數十次的原始辨識大部分都錯的機率是極低的!
所以知道他的用途之後,我就推薦他直接買我的停車場專用的六車道動態車牌辨識軟體就好了!價錢與單買DLL差不多,因為該軟體賣了很久我的研發成本早已回收,現在已降價一半五折在賣了!當然他也省去重複我之前的研發過程,直接買到合乎他期望的辨識軟體了!

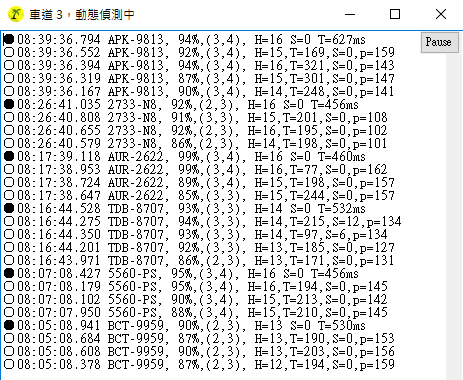
如上就是我的動態車牌辨識軟體的原始資料流的顯示圖!如果合格的辨識結果重複出現達到門檻次數時,那個黑圓圈就是代表確認結果會輸出為正式資料的一筆影像了!這種軟體我已賣出約兩百套了!這麼多地方都持續使用多年沒問題,這位客戶當然不必自己再重複這種研發了!結果當然是很快樂圓滿的!









限會員,要發表迴響,請先登入


