Design features and operation steps of geared stepper motors
2024/08/13 16:21
瀏覽101
迴響0
推薦0
引用0
1.Definition of geared stepper motors
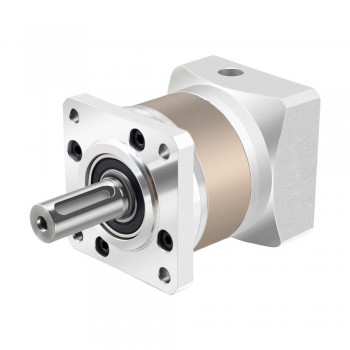
A geared stepper motor is a motor that combines a stepper motor and a gear reducer. It consists of three parts: the motor body, the reducer, and the encoder. The reducer reduces the speed and increases the torque, while the encoder is used to feedback the rotation of the motor. The working principle of the geared stepper motor involves two aspects: the motor body and the reducer. The motor body uses the magnetic field to achieve rotation, and the magnetic field between the stator and the rotor causes the rotor to rotate around the stator

2.The role of the geared stepper motor
1.Amplified torque: The output torque of the stepper motor is amplified by the built-in gear mechanism. This is because the gearbox is able to multiply the torque of the motor by an amount proportional to the gear ratio and the efficiency of the gearbox, thereby increasing the load capacity of the motor.
2.Improved allowable inertia: After adding gears to the stepper motor, the load-to-motor inertia ratio can be effectively reduced within a controllable range, which helps prevent the stepper motor from losing steps and improves the stability and reliability of the motor.
3.Reduce vibration: The extra speed required by the motor after the motor is equipped with a gearbox means that the motor runs outside its resonant frequency range, which significantly reduces the phenomenon of motor resonance and vibration.
4.Improve positioning accuracy: The precise positioning capability of the stepper motor requires a high-precision and backlash-free planetary gearbox. The gear reduction stepper motor maintains the same level of accuracy as the motor body through its precise gear mechanism, ensuring high-precision position control
3.Design features of gear stepper motors
1.High accuracy: The rotation angle of the gear stepper motor is proportional to the number of input pulses, which means it has high position control accuracy. In addition, since the precision of each step is 3% to 5%, and it is not easy to accumulate the deviation of one step to the next step, the gear stepper motor has good position precision and repeatability of movement. This feature makes the gear stepper motor perform well in occasions where precise position control is required.
2.Fast response: Geared stepper motors have a large torque when the rotation stops, thanks to their excellent start-stop and flip response capabilities. In addition, due to the absence of carbon brushes, the geared stepper motor has a high reliability, and the service life of the motor mainly depends on the life of the rolling bearing. This design feature makes the geared stepper motor perform well in situations where fast response is required.
3.Simple structure: The structure of the geared stepper motor is relatively simple, and only the load needs to be directly connected to the drive shaft of the motor to achieve simultaneous rotation at extremely low speeds. In addition, since the motors response capability is determined only by the data pulse signal, open-loop control can be selected, further simplifying the motors structure and operating costs. This simple design makes the geared stepper motor relatively convenient in both maintenance and use
4.Operation steps of the geared stepper motor
1.Direction control: The direction of movement of the stepper motor can be achieved by changing the input signal of the driver. By adjusting the input signal of the driver, the motor can be controlled to rotate clockwise or counterclockwise.
2.Frequency control: The speed of a stepper motor can be controlled by changing the frequency of the driver. Increasing the frequency speeds up the motor, while decreasing the frequency slows it down.
3.Current and step size adjustment: The driver hardware can also adjust the current and step size, where the current affects the torque of the motor and the step size affects the accuracy of the motor. By adjusting these parameters, the performance of the motor can be optimized to meet the needs of a specific application.
4.Single-phase stepping, full-stepping, and half-stepping: There are three main control modes for stepper motors, including single-phase stepping, full-stepping, and half-stepping. These modes control the movement of the motor through different power-on methods and rotor positions. In the single-phase stepping mode, phases A and B are powered in a certain order, and the rotor rotates accordingly. In the full-stepping mode, windings AB are powered at the same time. The half-stepping mode is a combination of single-phase stepping and full-stepping, providing smoother rotation.
5.Use driver control: When using a driver to control a stepper motor, you need to correctly connect the motor and driver, and set the correct direction, frequency, and other parameters as needed. Make sure the output voltage and current of the driver match the motor specifications to avoid damaging the motor or driver.
自訂分類:不分類
上一則: Driving mode of pancake stepper motor下一則: Some important information about stepper motor encoders
你可能會有興趣的文章:
限會員,要發表迴響,請先登入


