
我的電腦裡面大概有數萬張各種情境下拍攝的車牌照片,大部分是客戶發現無法辨識或辨識錯誤時回饋給我的。我不會將這些當作客戶的負評,急於找藉口答辯,而是滿口感謝!也立即研究問題所在,可以立即改善的部分,當天就改程式更新給客戶了,一時無解的部分也會跟客戶好好解釋自己技術還不及的原因。
車牌辨識可說是易做難精!現在任何玩電腦的人都可以隨時用OpenCV之類的程式庫模組快速組裝出自己的車牌辨識軟體,但是辨識能力要好到能賣呢?所謂的贏者全拿定律,沒有人會買次級品,即使只是停車場最簡單情境的車牌辨識核心軟體,都只有三五個品牌。
我的野心不只是做出停車場用的程度,而是希望在任何情境下都可以跟人眼的識別判斷力一樣好!即使在台灣市場上,我的辨識軟體已是頂尖水準,但距離挑戰人眼這個終極目標還差得很遠!我天天研究各種影像辨識的問題,每隔一段時間總有新的想法與演算法可以回頭讓我的車牌辨識核心更為精進!
這兩天就是趁著螺絲釘的辨識進度告一段落,想著這段時間在超高雜訊超模糊的螺絲釘頭上辨識字元的經驗,是不是可以有些新概念與技巧可以用來提升我的車牌辨識核心的模糊辨識能力?所以就挑上車燈眩光的辨識情境了!接下來可能還會挑戰攝影失焦導致模糊的狀況,事實上兩者是同時進行中的。
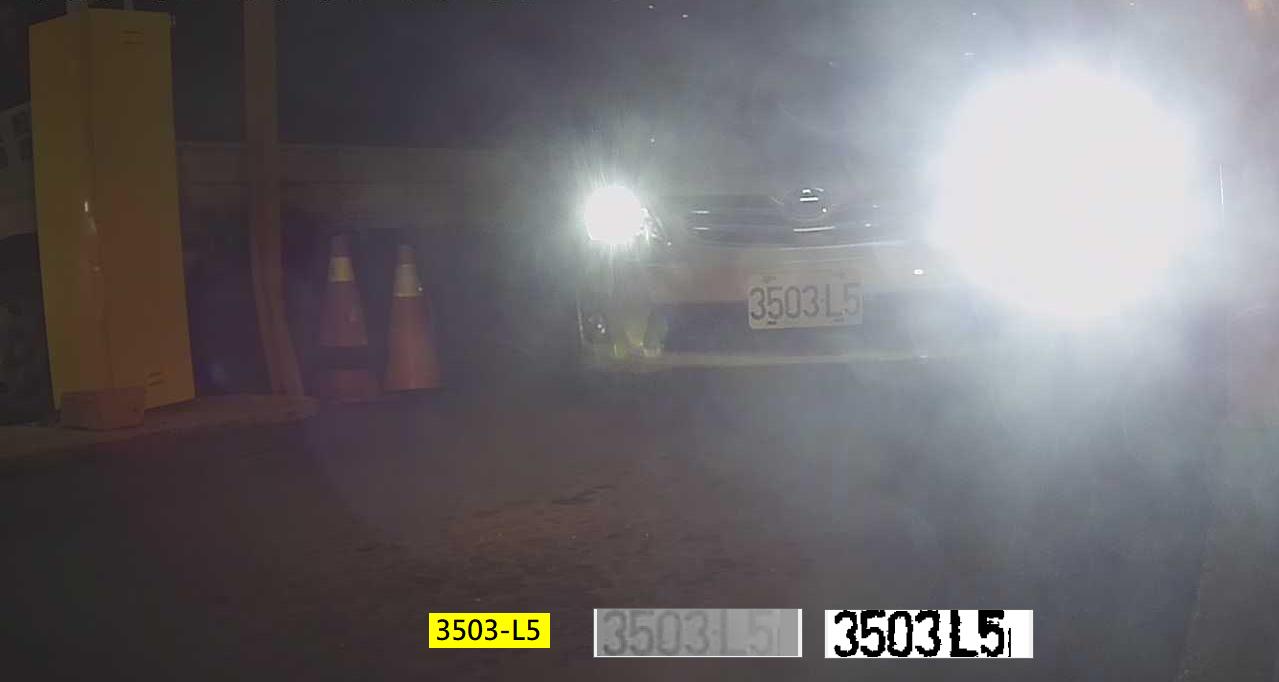
車燈眩光下所以難辨識的原因有二:第一是車牌內各個字元的亮度差異很大,很多以「整個車牌」為計算基礎的演算法都不能直接使用!另一個問題是接近車燈的字元曝光過度,字元與車牌背景的亮度差值(對比度)會非常小!會漏掉沒辨識到的字元永遠都是車燈旁的那個字!
通常在自然情境辨識車牌最困難的不是辨識是甚麼字?而是正確鎖定車牌位置,避免錯抓環境中其他相似的目標,即使你的篩選機制很聰明,非車牌目標最後會被排除不會誤報給客戶,但也會浪費時間,讓車牌辨識速度太慢。所以我們總是會將搜尋目標的對比度門檻拉高,以節省辨識時間及降低誤報的可能。
但是這樣一來就很難兼顧亮度與對比度範圍都很大的炫光下的車牌了!我這次的進化主要是會先做一個診斷,發現可能有這種炫光狀況時,就大幅降低目標對比度的門檻,所以只會影響這些特殊影像的辨識時間,不至於讓所有正常的影像辨識都被拖慢。所以先做診斷決定不同的參數與流程就是關鍵!
影像辨識就是這樣的,就像我們起床一睜眼就看到燦爛的陽光,或是忽然進到陰暗的空間,也會立即在大腦中切換辨識模式的!絕對沒有簡單的唯一流程去辨識所有的環境與所有的目標,所以那些AI機器學習派常常輕率強調影像辨識的「通用性」時,我就覺得很像是詐騙集團說的話!通通都能用的辨識軟體,也代表通通都辨識不準的意思!
意思是說:即使我的軟體看起來是單一程式,但是面對每一張影像,一開始一定會有一些低解析度的掃描判斷影像特性,然後才決定最有效率的參數與次流程,就像病人到醫院一定會先做一些檢驗或諮詢,然後才找到正確的門診與醫生去看病的!




















限會員,要發表迴響,請先登入


