我的答案是, 目前還沒有.
目前電動助動自行車的趨勢必然往搭配扭力傳感器發展, 小編能想像的好處有
1. 即時回饋騎乘者之踩踏力(等同了解坡度)
2. 無需踩踏一定角度後才感知車輛啟動
3. 能夠計算於人力雙腿的輸出能量(功率)
4. 日版法規之需求
5. 剎車斷電功能可取消
一般來說, 速度傳感器的成本由2美元到十多美元不等. 磁極數量由6個提升到36個. 以36個磁極的傳感器為例, 成本增加不多的情況下能夠每10度便量測到下個訊號, 在應用上已大幅改善了原來的缺點. 因此在低價市場與以平路騎乘為主的銷售區域都還能夠持續出貨. 速度傳感器最大的詬病在於無法區分路面坡度所造成踩踏力的差異. 但不少控制器廠商都能夠以馬達速度比上速度傳感器的轉速比例來模擬與補償對馬達輸出的控制. 其實小編仍有騎過補償效果不錯的車輛.
回歸正題, 扭力傳感器在使用上需要具備的有
1. 是否需要專用車架? 此需求會讓許多start up的人打退堂鼓, 擔心若投入過多的專用車架將無法轉換至他種傳感器.
2. 是否好安裝? 一般腳踏車廠對於踏複雜的安裝並無法輕易接受.
3. 量測/輸出的電壓值(初始與最大)是否穩定? 傳感器本訊號必須穩定且大量出貨時一致, 另若安裝步驟繁瑣或需要高精準度的車架, 均會造成使用上的不便.
4. 最大能量測多少踏力? 若能量測到60kg的踏板力, 小編認為以經可以符合90%以上Ebiker的需求.
5. 是否量測雙腳踏力? 此點牽涉到控制器韌體處理人員的功力, 但總體來說, 單邊踏力量測的情況下總是得猜測另一邊的行為模式, 想當然爾, 人的行為模式是無法靠猜測得之, 必然影響到好的騎乘感.
6. BB傳感器而言, 心軸介面為何? 大部分的心軸規格仍是四方孔(square taper), 但單車的等級若提升並不會侷限在四方孔上. 最好能夠提供更高規格的產品
7. BB傳感器而言, 心軸晃動? 在目前產品多數心軸不會晃動, 少數則會. 此舉影響到現代車架設計的公差比較小, 若心軸晃動可能導致齒盤或曲柄干涉車架等.
後面來談談扭力傳感器的幾大產品與其設計原理.
IDbike TMM
業界已經熟知的產品, IDbike其實申請了不少扭力傳感器的專利, 但其中真正導入ebike產品的是TMM”4”(申請中的第四種形式). 運作原理主要是以傳感器安裝在IDbike的吊耳中, 此吊耳中間有個細長的溝貫穿以降低吊耳強度, 故當後輪心軸受到鏈條拉力時可以使吊耳變形並擠壓TMM4. 由TMM4上的hall effect sensor偵側擠壓量並輸出電壓變化量, 其最大擠壓變形量為0.3mm. 因此可以明顯看到為了搭配TMM傳感器, 車架的後勾爪必須要修改配合吊耳, 這算是缺點. 由力學角度來看, 無論左右腳的施力均透過鍊條傳遞至後輪軸心, 因此可以量測來自雙腳的踏力. IDbike以前開放讓客戶自行生產吊耳或是組裝傳感器與吊耳, 但衍生許多初始電壓及變化量的問題. 目前IDbike改為出貨前將吊耳與傳感器預組裝並校正, 組車場僅須將整套組至勾爪上即可, 較不會出現初始值誤差過大的問題. 鏈條上傳遞的力量會與齒比有關, 因此在齒比大的狀況下, 踩踏時需要施較大的力方能拉動鏈條並產生吊耳形變, 換句話說最大齒比的情況下要產生最大扭力反倒是較難達成. 仍需藉由適當的變換齒比才能已較輕的出力拉動吊耳來得到較大扭力電壓值.
優點: 量測雙腳踏力, 無需校正開機電壓值, 量測力量範圍大
缺點: 車架需搭配專用勾爪, 接觸式量測
量測範圍: 0~300Nm
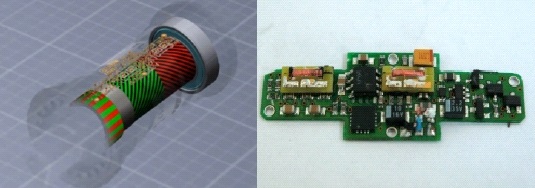
THUN X-CELL RT
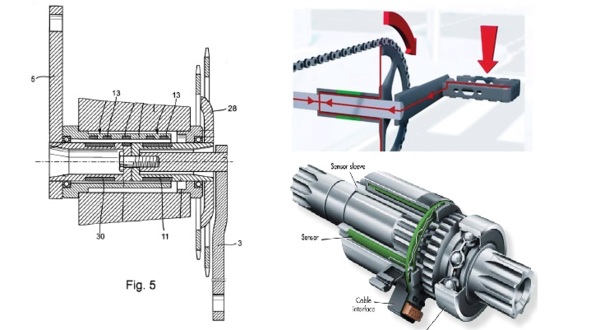
近幾年來業界所熟知的量測單邊踏力的扭力傳感器, 使用的技術為NCTEngineering所申請的專Pulsed Current Modulated Encoding
(PCME). 簡單說明運作原理為將心軸磁化, 在下圖中可見綠色與紅色區域的相角為互相垂直, 在電路板上的兩個線圈可以用來量測渦電流. 當左邊受力時, 心軸產生扭轉(torsion), 故紅色與綠色的相角變會隨著扭轉而改變角度(不再垂直了; 踏力越大扭轉越多), 此時線圈可以感知渦電流隨相角的改變進而換算成電壓輸出. 但為何只能量測單邊踏力? 力學解析來看, 發生扭轉的前提是心軸一端必須固定, 以腳踏車的心軸來說, 鏈條即為固定端, 在左邊施力才能得到扭轉的發生. 單邊量測所造成的缺點主要變是右腳的踏力是完全無法得知, 無論是起步或是針對爬坡所造成的變化均只能藉由控制器來猜測或預估. 因此便會發生類似速度傳感器的失真現象, 騎乘感覺並不會太好.
優點: 無需校正開機電壓值, 量測力量範圍大, 組裝容易, 同時提供RPM, 非接觸式量測
缺點: 需磁化心軸, 單邊量測, 五通處需要鑽孔
量測範圍: +/-200Nm
光學量測相關之五通傳感器
主要是在軸心上放置兩個光柵並透過光學量測兩組光柵間的相角差, 這是在很多Encoder常見的方式, 在不受力的情況下相角差保持固定, 但當軸心受到扭矩時相角差隨之變化, 變化量等同於踏力. Ergomo用此技術來做power meter以分析專業與競賽行為的功率輸出.
優點: 非接觸式量測
缺點: N/A
量測範圍: 0~450Nm
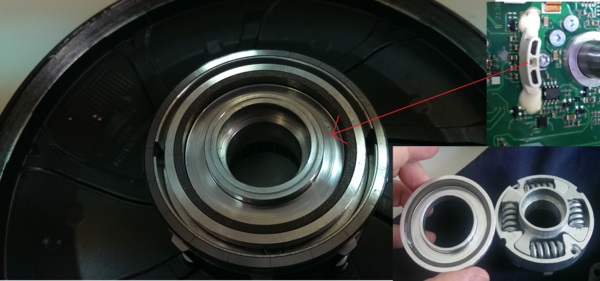
Neo Drives馬達內建整合型扭力傳感器
在馬達內部唯一能與踏板力扯上關係的零件/部位只有一個, cassette body. Neo Drives在cassette body內裝上四組彈簧. 照片中有拆解的照片. 彈簧伸展的方向與棘輪座正轉方向相反. 彈簧固定座連接兩組同心圓的磁環中的內環, 外環與花鼓殼固定在一起. 兩個磁環均為16極, 未受力時以兩個磁環的相位角差為基準, 當鏈條張力拉動彈簧後, 兩個磁環因為彈簧張力而產生相角差. 由控制器版上的兩組霍爾IC(圖片中白色塑膠座)量測此相角差其正比於鏈條力.
優點: 內含於馬達不需額外組裝, 量測雙邊踏力, 非接觸式量測
缺點: 系統售價頗高
量測範圍: Unknown(由控制器整合)
Shimano STEPS 內置扭力傳感器
一般量測踏板力不外乎量測鏈條張力或直接在五通位置量測向下的分力, 由下圖可見, Shimano將右牙碗下方結構弱化, 造成局部容易因踏板下壓力而變形, 並且在此區域放置應變規, 以便得出踏板力與應變的關係. 但此專利僅應用在STEPS系統上.
優點: 內置於中置馬達內, 接觸式量測
缺點: 系統售價頗高, 有安裝角度的限制(須水平安裝)
量測範圍: Unknown
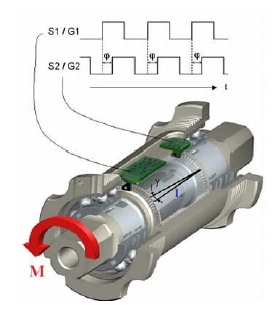
Fluxgate(通量閘) 量測方法之五通扭力傳感器
此技術早在1920年代便開始發展, 主要是用以量測地磁. 若以霍爾IC量測地磁, 訊號將會被外界雜訊干擾. 為了因應航天, 航空及航海等不同需求故發展出Fluxgate技術. 運作原理主要就是兩組線圈以磁飽和物質串連並圍繞在磁化的軸心旁, 其中將電流導過第一組線圈, 此時若無踏板力也就不會造成心軸磁性變化, 此時第二組與第一組線圈間的淨感應電壓應該相同. 若踏板施力導致心軸磁性變化故第二組線圈的淨感應電壓將會改變. 故踏板力會與淨感應電壓差成比例.
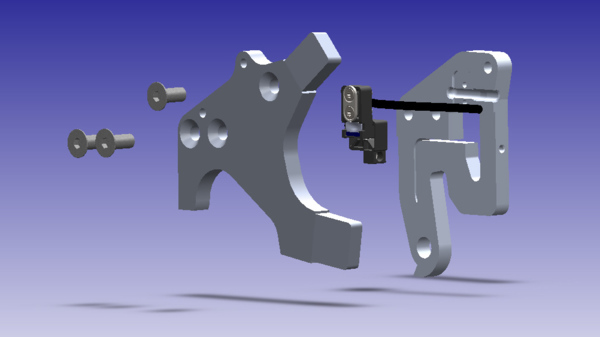
FAG BB torque (Bosch 第一代)
與上述量測磁場改變的原理差異不大, 嚴格說也是採用NCTEngineering的心軸磁化技術, 跟通量閘技術的差異為兩組線圈為獨立安裝, 並沒有磁飽和物質串在一起. 由圖片中可看出當左右腳施力, 力量透過曲柄與心軸傳遞進而擠壓感應軸套. 故感應線圈會因感應軸套磁場改變而量測到兩組線圈間的感應電流差異. 雖使用NCTEngineering的磁化技術, 但因改變結構因而能夠量測雙腳踏力.
優點: 同時提供RPM, 非接觸式量測, 雙腳訊號但提供給Bosch系統使用
缺點: 需磁化的感應軸套, 無角度安裝限制
量測範圍: 0~90Nm (on bikes)
中國扭力傳感器
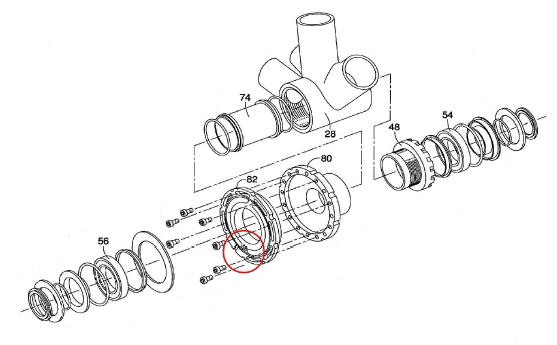
8Fun BBTS
運作原理與Fluxgate/NCTEngineering 仍是十分類似. 雖然沒有NCTEngineering的磁化心軸/部位, 但是以薄鋼片加上呈90度角的切痕取代磁化技術, 而薄鋼片安裝於軸套上與兩側齒環固定. 以很大的兩組線圈來感應薄鋼片在受力狀況下而導致磁通變化. 能夠量測雙腳踏力的原因在於軸套上與兩側齒環固定, 能夠為左右腳力量傳遞的扭矩產生抗力, 故使軸套扭轉變形.
優點: 同時提供RPM, 非接觸式量測, 量測雙腳踏力
缺點: 零件數多, 需用專用的spider
量測範圍: 0~60Nm (實際)

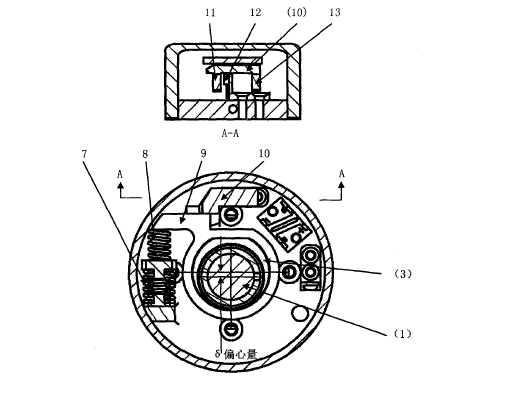
倍力
無樣品, 僅能從專利文件上略窺一二. 專利上約莫主張由內部的彈簧來抵抗鏈條拉動心軸的移動量, 踏板力轉化為鏈條張力透過楔形塊將移動量轉化為斜向移動量, 最後由霍爾IC量測此移動量.
台灣其他
目前台灣很多廠商使用應變規或嘗試使用壓電材料, 但應變規有其先天上使用的缺點, 為了量測稍準就已經得多貼幾個, 甚至為了做溫度補償還必須多貼一個應變規. 製程上也不是很方便.
若說到TDCM的BB扭力傳感器, 因為其安裝難度, 電壓輸出值的範圍不易控制, 無法裝在使用內變速花鼓車種, 雙邊量測的問題加上心軸移動量大等種種問題, 小編若做為系統整合者, 對於此產品則是興趣缺缺.
對於目前市面上的產品在力學上的應用與量產一致性都還很大的成長空間, 也因為腳踏車結構太簡單, 再再加深扭力傳感器開發與量產的難度. 若以五通傳感器來說, ISIS規格少有廠商有, 外掛陪林相關產品甚至付之闕如.
Daniel Nov. 3rd, 2014
下一則: The review of Stromer ST2 (介紹與試乘心得)
限會員,要發表迴響,請先登入


