簡介:
本軟體以一般道路情境之全景多車牌辨識為目標,可同時設定高達六個攝影畫面視窗的辨識。會依據電腦效能盡量快速擷取連續的串流影像畫面,並將畫面中所有出現的車牌加以辨識作為原始資料,再經過統計篩選,排除偶發的錯誤辨識結果,輸出穩定可靠的車牌辨識報告。
因為辨識核心對於車牌傾斜、斜視與汙損模糊等辨識困難的邊緣狀況,皆有針對性的演算法因應,且效率極佳,是目前道路複雜情境下高速大量辨識所有車牌的最佳選擇!純軟體定價七萬元整!可提供免費試用版30天!電洽:0921816706
系統特性介紹:
l 超高辨識速度
本軟體以逸中軟體公司自行開發之高辨識率與高速度車牌辨識核心為基礎,搭配多執行緒平行運算之技術,充分運用現今多核心電腦之效能,達到極高之辨識速度。具體之辨識速度會因電腦CPU之規格、辨識區域之大小與辨識區影像之複雜度而有差異,通常可達20Hz,但只須超過10Hz即可符合絕大多數動態辨識之需求。
l 智慧篩選即時資料的能力
在大量、高速與高正確率的辨識資料流基礎上,每一車輛之車牌辨識結果都是經由即時的統計、分析與篩選之後作出的決定!連續辨識中因:距離、角度、焦距欠佳,或車牌尚未完整進入視野,產生之偶發錯誤辨識結果多數將被排除,大量重複之正確辨識結果亦將經過篩選,僅輸出一筆資料,含全景照片與時間地點等相關資訊,因此誤報與漏報之機率甚低!
l 監看範圍設定之彈性
本軟體可自由設定高達六個視窗的辨識區域,可以鎖定車牌可能出現的熱區範圍,避開無關之影像背景雜訊,並集中電腦運算效能提升辨識效率,具備極佳的使用彈性。
l 廣角多車道辨識之能力
本軟體辨識核心具備單一影像多車辨識的能力,辨識範圍可涵蓋二至三個馬路車道同時進行辨識。且車牌側向辨識角度可高達60度,水平傾斜角度可達45度,亦即幾乎全景影像中任何位置出現之車牌皆具有很高的辨識能力。
軟體操作介紹:
l 起始畫面
l GPS設定
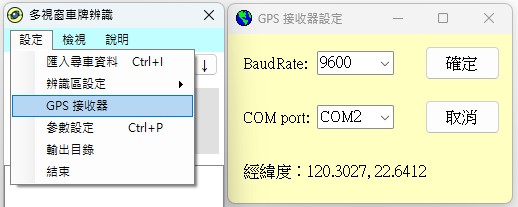
如上圖所示:選擇設定→GPS接收器,即出現右方小視窗,指定GPS使用之傳輸率與通訊埠即可。
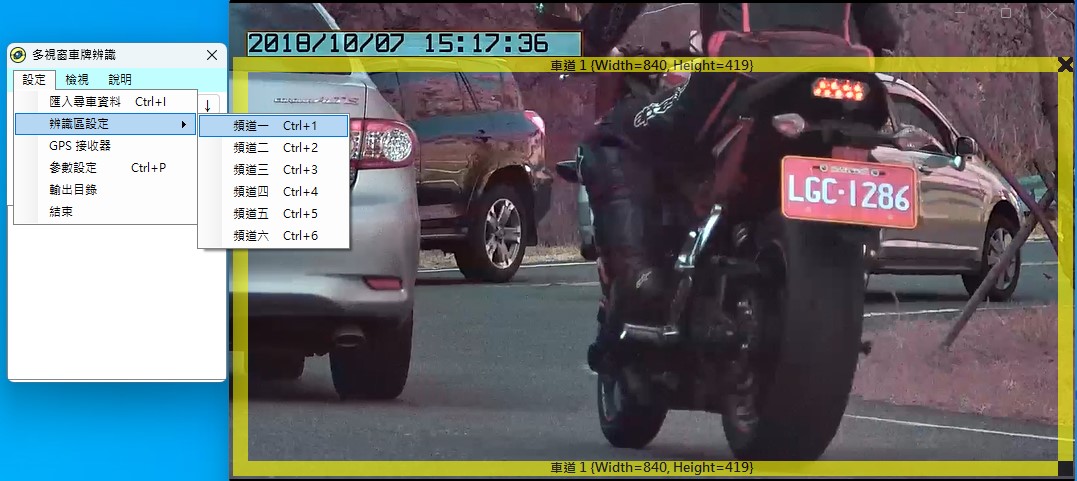
l 設定辨識區範圍
選擇設定→辨識區設定→頻道X,會出現半透明黃色框架,拖曳黃色部分可移動此辨識框,拖曳右下角黑色方塊可改變寬高,點擊右上角的紅色方塊可關閉此框架並確定辨識區修改。此設定具有記憶功能,不須每次重複設定。
l 匯入尋車資料
接受CSV格式,即文字檔案欄位以逗點分隔的資料如下:
ABC-1234, 張三, …
本程式只會處理第一欄的車號資料,如辨識到車號之一就會出現警示視窗!

l 檢視原始資料
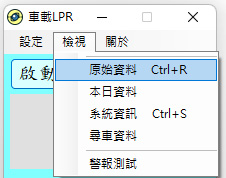
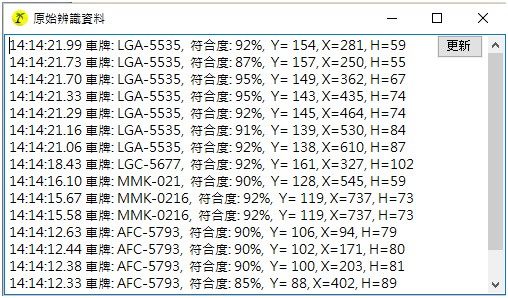
原始資料就是所有實際完成的辨識結果,檢視此視窗可以確認系統是否正常執行辨識,可以看到原始資料中錯誤難免,但是多半不會顯示於正式輸出資料,軟體有內部的統計篩選機制,可抑制大多數的錯誤與重複資料。
l 檢視本日資料
本軟體辨識結果會寫入預設工作目錄,並產生資料索引網頁如下:
欄位意義依序為:站名、時間、車號(超連結至影像檔)、緯經度、車速(km/hr),此部分可依使用者需求客製化。
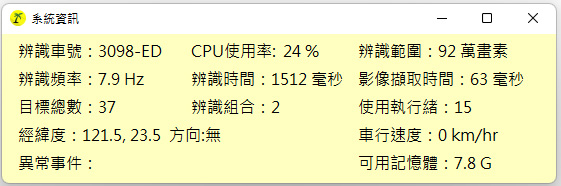
l 檢視系統資料
注意事項:
l 辨識尺度要求
此軟體辨識核心可辨識車牌字元最小約為15畫素高,小於此數未必無法辨識,但正確率將明顯下降。
l 辨識角度要求
車牌水平傾斜之容忍度可達45度,左右側向辨識之容忍度約60度,俯視容忍度約為50度,大於此範圍未必無法辨識,但成功率會明顯下降,在上述容忍度內辨識正確率則無任何差異。
l 影像品質要求
每一影像辨識區大小基本上沒有限制,但以0.5至1.0百萬畫素之間為宜,此為設計本辨識核心時最常使用之影像大小範圍。建議使用百萬畫素以上之數位攝影機,目標車牌字元應準確對焦輪廓清晰。
l 電腦品質要求
本軟體預設使用多執行緒運算,建議以較高效能之多核心CPU電腦為宜,若軟體執行時顯示之辨識速率低於15Hz表示辨識效能不足,車速較高時容易漏車,應酌減辨識區大小,或提升電腦硬體規格。
l 本軟體可開啟多執行個體
如電腦效能較佳,足以同步執行多攝影機畫面辨識,可同時開啟多個程式實體進行辨識!各程式時體將分享GPS資訊,資料輸出於同樣之指定目錄。






限會員,要發表迴響,請先登入


