
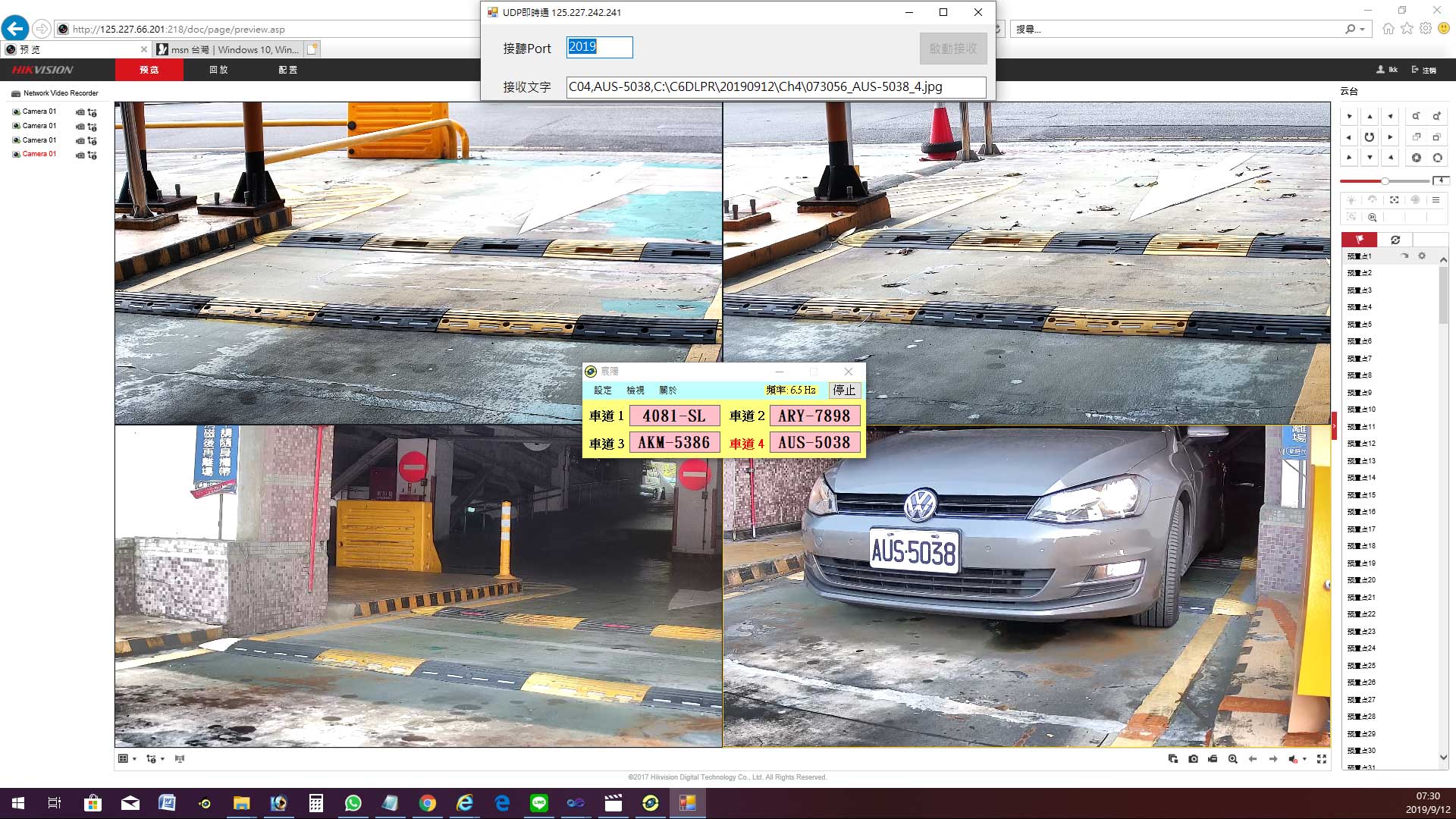
上面是我這幾天上班一直盯著看的畫面,我賣的停車場車牌辨識軟體主要是這種四車道的動態辨識,也賣兩三年了!但是老實說,我只是一個沒資本的鄉下小公司,卻一開始就將目標設定得太高了!如果沒有完整逼真的實驗環境做長時間的研究,要做出一個跟人有類似判斷力的「動態」辨識軟體,真的很難!所以每個客戶的新場地我都還是必須做一些研究調整,藉機會繼續研發,讓我的產品更聰明更廣用。
事實上目前多數的停車場車牌辨識系統都還是「靜態」辨識的架構,就是他們辨識的標的是車輛到達某個理想位置之後擷取快照做辨識的!最多只是連續擷取個兩三張影像做重複確認。像我這樣每一張影像都做完整的全圖辨識,一秒鐘辨識十幾張,再根據這些「Raw Data」作統計判斷的辨識方式,大概只有極少數學術界的團隊會這麼玩!這種架構要作到商品化很穩定,真的是超級大挑戰!
當然一般客戶不會很清楚我做的這件事情有多瘋狂!他們比較有印象的是我的側面與傾斜辨識能力不錯,比起其他的系統可辨識的範圍好像大一點,但那只是辨識核心演算法的不同,我是以辨識字元為基礎的,字元排列如果斜斜的,我就知道車牌歪了,可以作幾何修正。但是直接在全圖中找「矩形」車牌的演算法就不容易鎖定歪斜車牌了!這不是今天我要討論的主題。
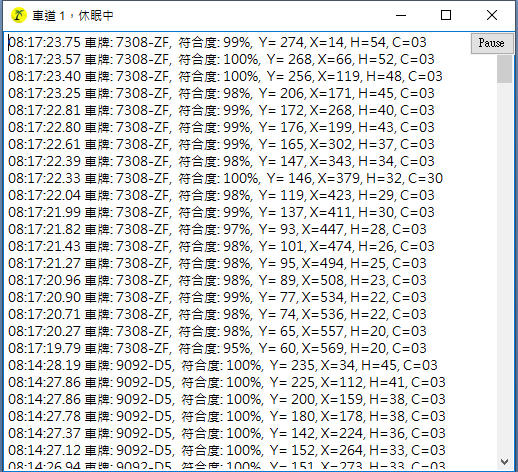
瘋狂的是:我的動態辨識軟體內部,原始資料流是像上面這麼多到氾濫的!這還是目標很清晰的狀況,如果車牌狀況差一點,或有反光遮蔽等狀況,我又是連續不間斷的辨識,當然會有很多「不對」的辨識結果,如何統計排除異常確認最佳答案就不是那麼一翻兩瞪眼的事了!應該算是一種人工智慧的判斷吧?
要教會軟體面對各種異常時如何處置?尤其是不能誤報離譜的答案,譬如計程車上的電話號碼等!這些過程已經跟我們教小朋友辨識車牌差不多了!所以我的軟體常會被批評比別家產品「不穩定」!就是容易自作聰明報些奇怪的答案等等。這些意外如果沒有現場過程的觀察或錄影,我就只能靠想像力解決,有如隔靴搔癢,要是我想錯了就會再被罵一次!
所以當客戶願意給我如第一張圖那樣的現場即時連線時,我會感激涕零,他們開放連線幾天我就會守著畫面幾天!即時觀察現場狀況、立即改程式、也立即繼續測試,這樣的做法減少了很多循環嘗試錯誤還被嫌棄抱怨的壓力!想像一下,如果我要自己建立這樣的「實驗」環境需要多少錢?以戰養戰,我就不必先集資幾百萬來開發車牌辨識軟體了!
如果你是有資金的老闆,應該知道:想做到我現在做到的事情,必須的投資不只是幾百萬,而是上千萬!還不一定會有成果!要請專家高手就必須年薪百萬了,研究設備場地的建置加上幾年的研發時間,最終如果不能達到足以跟其他廠商產品競爭的等級,乏人問津沒人買的話就千萬資本放水流了!
連我自己一開始也覺得做這種事情,不是百分百可以成功的!所以我堅持不集資開公司,怕做不出來負債跑路嘛!一路就是且戰且走,以戰養戰,運氣不錯才活到今天的!真的要感謝那些一邊罵我,還一邊願意繼續給我機會,甚至給我協助,讓我改進產品的客戶!是這些壓力與期許讓我越來越強一直活到今天的!